




来源:九游会游戏中心官方网站 发布时间:2026-05-09 05:54:18
在工厂里巡检了一天,不免会产生疲惫,这时就有人会想,如果有一个永远都不可能累的巡逻员能24小时坚
在工厂里巡检了一天,不免会产生疲惫,这时就有人会想,如果有一个永远都不可能累的巡逻员能24小时坚守岗位,甚至不用人遥控就能自己干活,那该有多好。
5月15日至16日,2026杭州国际具身机器人场景应用大赛将在杭州市西湖区云栖小镇拉开序幕,其中的“四足多模态巡检”项目,正在让这一想象加速照进现实。
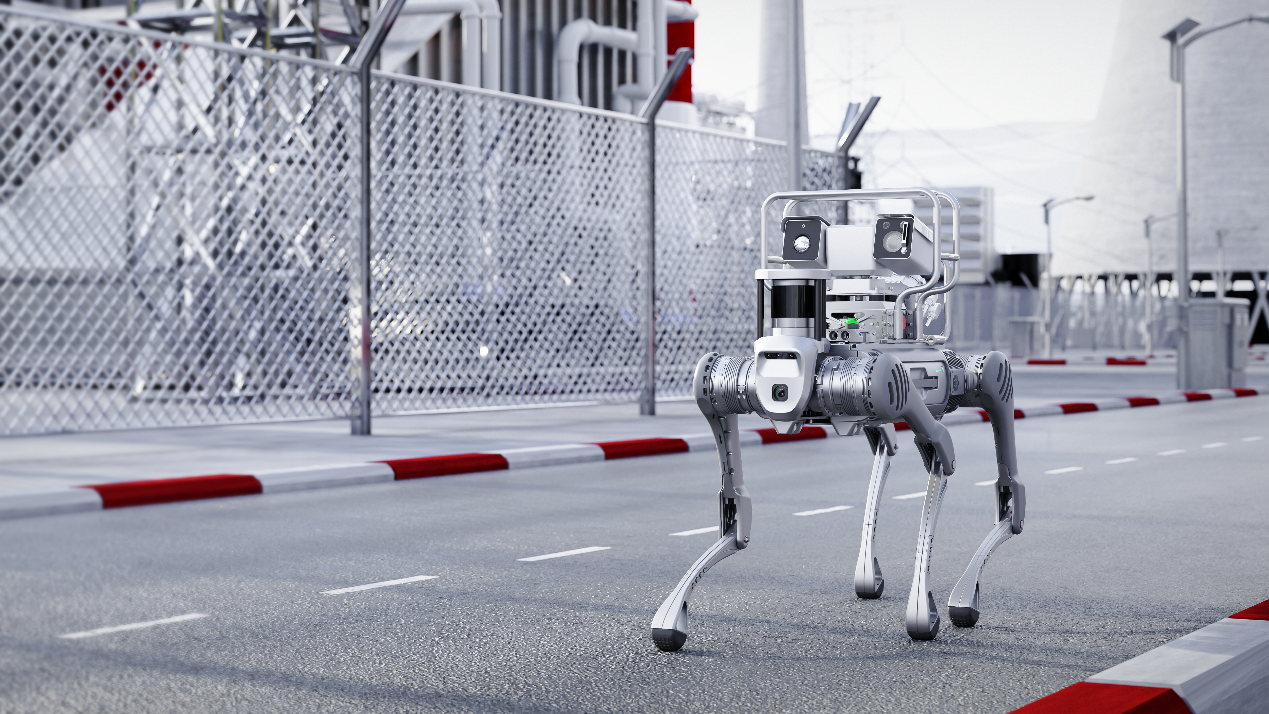
这一项目位于一块约5米长、4米宽的场地内,共设置了启停区、障碍物、避障区、台阶、抓取平台、中转平台、检验测试平台、放置平台等多个区域。参赛队伍需统一使用项目主办方宇树科技的Go2系列四足机器人,在不一样的区域中“闪转腾挪”,完成相应任务。
比赛比什么?可以概括为考验机器人的三项能力:一是“走”,跨越与避开障碍,上下台阶,中途不能打滑摔倒;二是“拿”,物资要稳稳拿住,安全搬到目的地;三是“看”,两个物资不能搞混,中途遇到警示标志要立即反应。机器人要像一名真正的巡检员那样,有条不紊地跑完整个流程。
赛事的一大亮点是全程不可以使用遥控器。为何如此设置?“比赛目的是引导参赛队伍将智能感知的算法与四足机器人相结合。”赛事负责这个的人说,参赛团队必依靠机器人的智能感知和自主导航能力,由机器人独立执行任务,“这既能培养参赛队员的编程能力、算法设计能力及任务规划与优化能力,也可以考查四足机器人在与视觉算法相结合情形下的各项能力。”
在具体巡检场景中,机器人需要代替人完成大量巡检任务,尤其在消防等危险场景里,机器人要独立进入许多人不能到达的地方。这时候,想要让人放心地把巡检工作交给机器人,机器人一定要具有完全的自主感知决策与任务执行能力,而不是依赖人工遥控。

比赛名称中的“多模态”三个字引人注意。“多模态指的是系统能理解、处理、生成或融合两种及以上不同模态的信息,模拟人类多感官协同认知的方式,实现更全面的信息交互与智能决策。”赛事负责的人介绍,在多模态任务中,机器人需要接收和分析图像、视频等各种数据,形成综合性理解,从而能完成更复杂的任务。
简单来说,就是让机器人像人一样,调动多种“感官”协同工作,比如摄像头就是看图像的“眼睛”、声音传感器就是听指令的“耳朵”,机器人会对收到的不同信息做综合判断后再做出反应。
据赛事负责的人介绍,以往的机器人比赛往往侧重于单一技能比拼,比如跑步或是抓取;而多模态巡检要求机器人在一段任务流程中,综合运用感知、识别、运动等各项能力,连续完成越障、避障、物资搬运、动作交互等多个任务。这对机器人要求更高,也使得机器人更满足实际需要。

这一赛题背后,是真实的产业需求。在电力、石油等行业中,大量巡检工作重复、繁琐、体力消耗巨大,人力成本也很高。“机器人巡检可以替代一些重复、艰苦的岗位,实现全天自主巡检。”赛事负责人解释,一些原本在大多数情况下要“三班倒”的巡检工作,机器人独自就能完成。
赛事负责这个的人说,本次比赛的初衷也正是通过考核四足机器人在复杂工业场景下的多模态任务执行能力,推动四足机器人技术在工业、电力、石油等领域的实际应用落地,从而把人从枯燥劳累的巡检工作中解放出来。
还有不到一个月,大赛就将正式开幕。对机器人巡检感兴趣的朋友,不妨来云栖小镇亲眼观看机器人跨越障碍、精准搬运的英姿。大胆想象一下,赛场上的每一台机器人,可能明天就会走进巡检的现场,成为你的“新同事”。
考核四足机器人在复杂工业场景下的自主导航、环境感知、物资抓取与运输、视觉识别等多模态任务执行能力。
每支队伍在限时10分钟内共有两次比赛机会,取最好成绩。四足机器人自主完成以下任务流程:
启停区出发→跳过起点障碍物→避障区入口→完成避障→台阶正前方→上下三级台阶→抓取平台→抓取起始物资并识别标志→中转平台→卸载起始物资并抓取场地物资→检测点→检测警示标志并做对应动作→放置平台→根据识别标志卸载场地物资→跳过终点障碍物→稳定停靠启停区。